Distributed Conjunctive Single-Selection (3-SAT)
| Author: | Wolfgang Scherer |
|---|
Contents
Base Problem
Boolean Formula
(( ¬a0 ∧ ¬a1 ∧ ¬a2 ) ∨ ( ¬b0 ∧ ¬b1 ) ∨ ( ¬c0 ∧ ¬c1 )) ∧ (( ¬a0 ∧ ¬a1 ∧ a2 ) ∨ ( ¬b0 ∧ b1 ) ∨ ( ¬d0 ∧ ¬d1 )) ∧ (( ¬a0 ∧ a1 ∧ ¬a2 ) ∨ ( ¬d0 ∧ d1 ) ∨ ( ¬e0 ∧ ¬e1 )) ∧ (( ¬a0 ∧ a1 ∧ a2 ) ∨ ( ¬e0 ∧ e1 ) ∨ ( ¬f0 ∧ ¬f1 )) ∧ (( a0 ∧ ¬a1 ∧ ¬a2 ) ∨ ( ¬f0 ∧ f1 ) ∨ ( ¬g0 ∧ ¬g1 )) ∧ (( b0 ∧ ¬b1 ) ∨ ( ¬c0 ∧ c1 ) ∨ ( d0 ∧ ¬d1 )) ∧ (( b0 ∧ b1 ) ∨ ( f0 ∧ ¬f1 ) ∨ ( ¬g0 ∧ g1 )) ∧ (( c0 ∧ ¬c1 ) ∨ ( e0 ∧ ¬e1 ) ∨ ( g0 ∧ ¬g1 ))
Clause Vectors
[
[ 0 0 0 _ _ _ _ _ _ _ _ _ _ _ _ ]
[ _ _ _ 0 0 _ _ _ _ _ _ _ _ _ _ ]
[ _ _ _ _ _ 0 0 _ _ _ _ _ _ _ _ ]
]
[
[ 0 0 1 _ _ _ _ _ _ _ _ _ _ _ _ ]
[ _ _ _ 0 1 _ _ _ _ _ _ _ _ _ _ ]
[ _ _ _ _ _ _ _ 0 0 _ _ _ _ _ _ ]
]
[
[ 0 1 0 _ _ _ _ _ _ _ _ _ _ _ _ ]
[ _ _ _ _ _ _ _ 0 1 _ _ _ _ _ _ ]
[ _ _ _ _ _ _ _ _ _ 0 0 _ _ _ _ ]
]
[
[ 0 1 1 _ _ _ _ _ _ _ _ _ _ _ _ ]
[ _ _ _ _ _ _ _ _ _ 0 1 _ _ _ _ ]
[ _ _ _ _ _ _ _ _ _ _ _ 0 0 _ _ ]
]
[
[ 1 0 0 _ _ _ _ _ _ _ _ _ _ _ _ ]
[ _ _ _ _ _ _ _ _ _ _ _ 0 1 _ _ ]
[ _ _ _ _ _ _ _ _ _ _ _ _ _ 0 0 ]
]
[
[ _ _ _ 1 0 _ _ _ _ _ _ _ _ _ _ ]
[ _ _ _ _ _ 0 1 _ _ _ _ _ _ _ _ ]
[ _ _ _ _ _ _ _ 1 0 _ _ _ _ _ _ ]
]
[
[ _ _ _ 1 1 _ _ _ _ _ _ _ _ _ _ ]
[ _ _ _ _ _ _ _ _ _ _ _ 1 0 _ _ ]
[ _ _ _ _ _ _ _ _ _ _ _ _ _ 0 1 ]
]
[
[ _ _ _ _ _ 1 0 _ _ _ _ _ _ _ _ ]
[ _ _ _ _ _ _ _ _ _ 1 0 _ _ _ _ ]
[ _ _ _ _ _ _ _ _ _ _ _ _ _ 1 0 ]
]
a a a b b c c d d e e f f g g
0 1 2 0 1 0 1 0 1 0 1 0 1 0 1
Complexities
n-complexity:
O(215) = 32768
m-complexity:
O(⌈3 ⁄ 2⌉8) = O(28) = 256
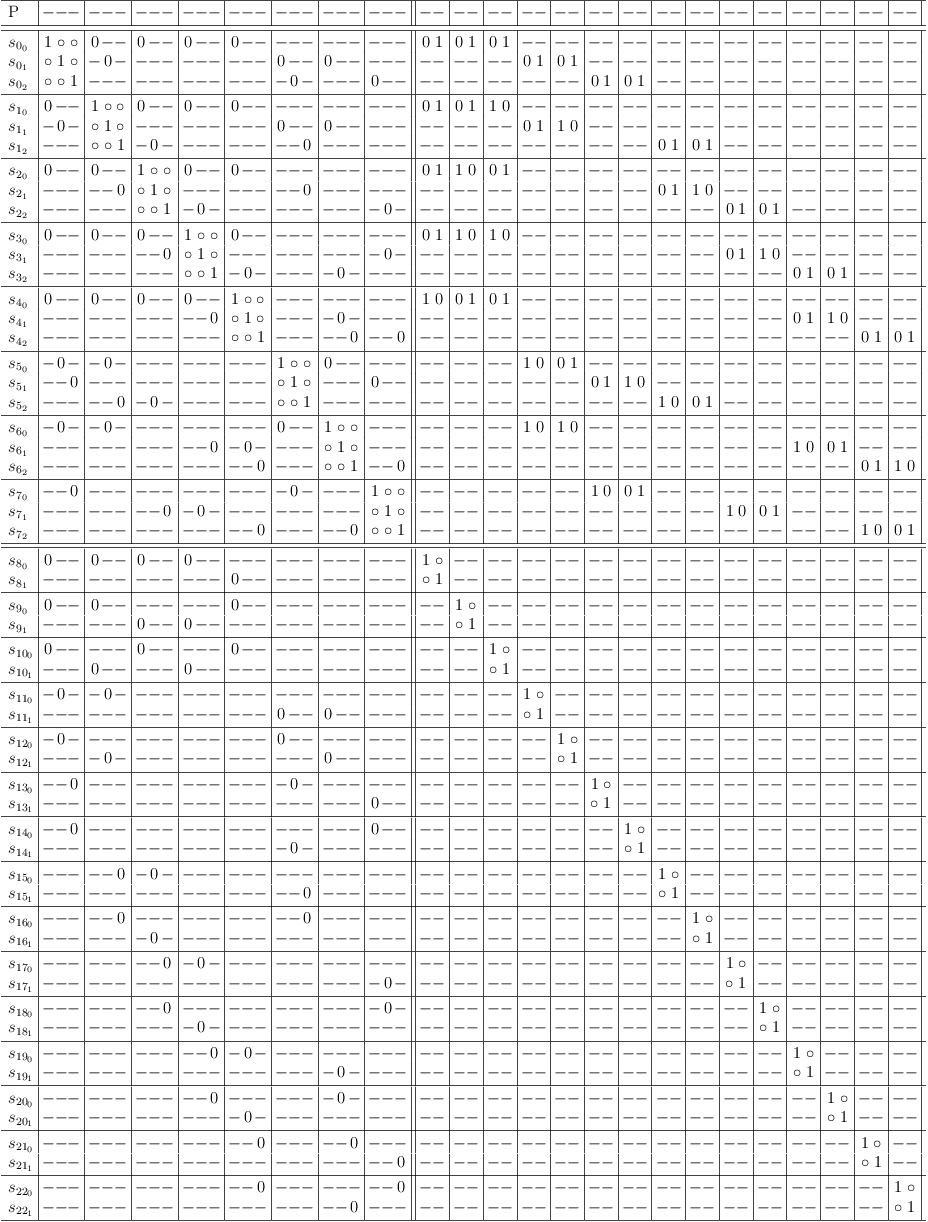
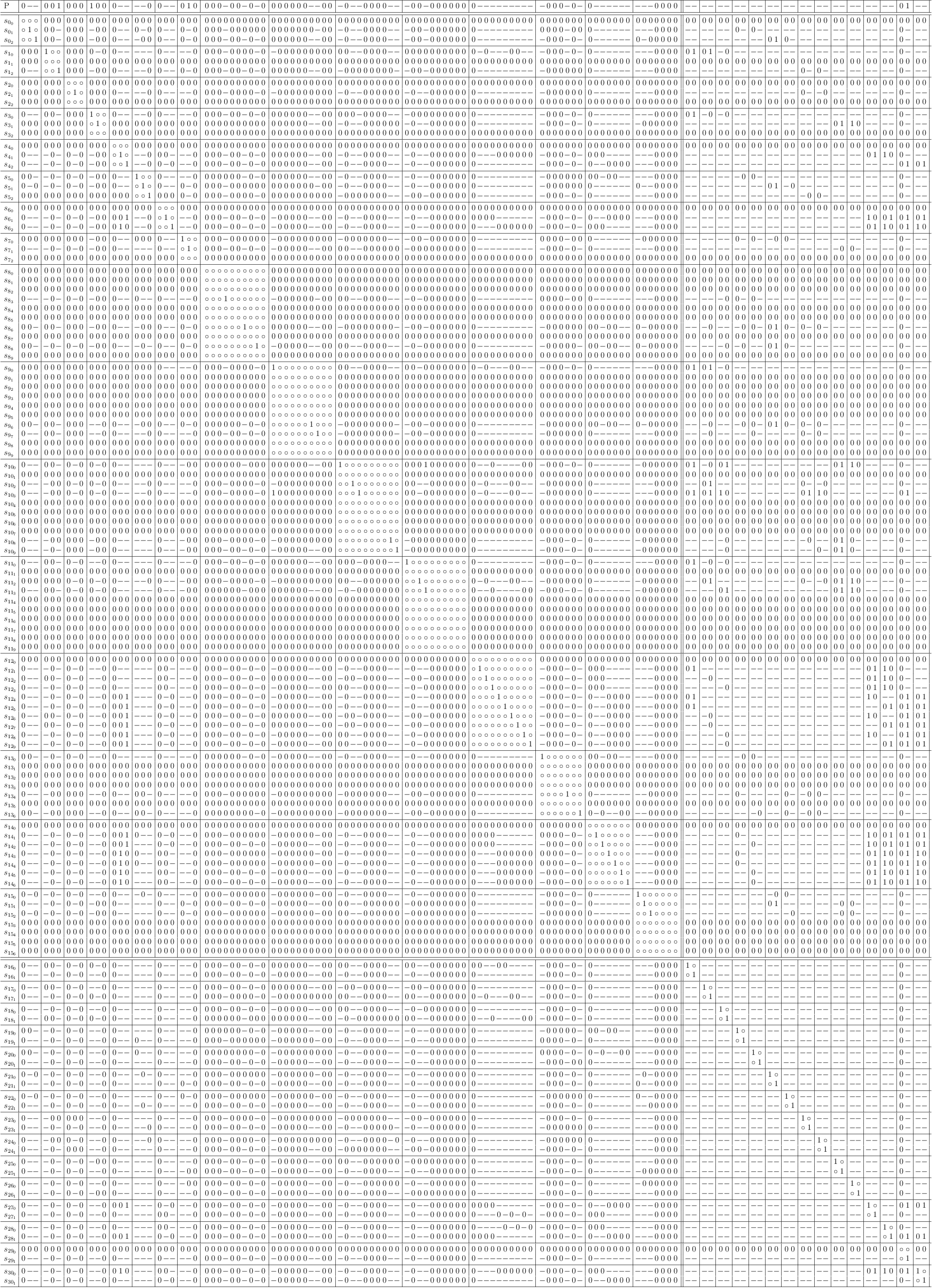
Fast Conjunctive Conflict Maximization
Fast conjunctive conflict maximization detects unsatisfiability immediately (s[2, 2]).
n-complexity:
O(215) = 32768
m-complexity:
O(⌈3 ⁄ 2⌉8) = O(28) = 256
Added Conflicts:
m-complexity:
O(⌈10 ⁄ 2⌉5)*O(⌈7 ⁄ 2⌉3) = O(55)*O(43) = 3125*64 = 200000
Copyright
Copyright (C) 2013, Wolfgang Scherer, <Wolfgang.Scherer@gmx.de>. See the document source for conditions of use under the GNU Free Documentation License.